
Po pierwsze, skład systemu
1. System ciągłego wykrywania przeciążenia autostrady składa się zazwyczaj z systemu gromadzenia informacji o przeciążeniu czołowych pojazdów ciężarowych i systemu analizy kryminalistycznej oraz z systemu zarządzania informacjami o przeciążeniu tylnych pojazdów ciężarowych.
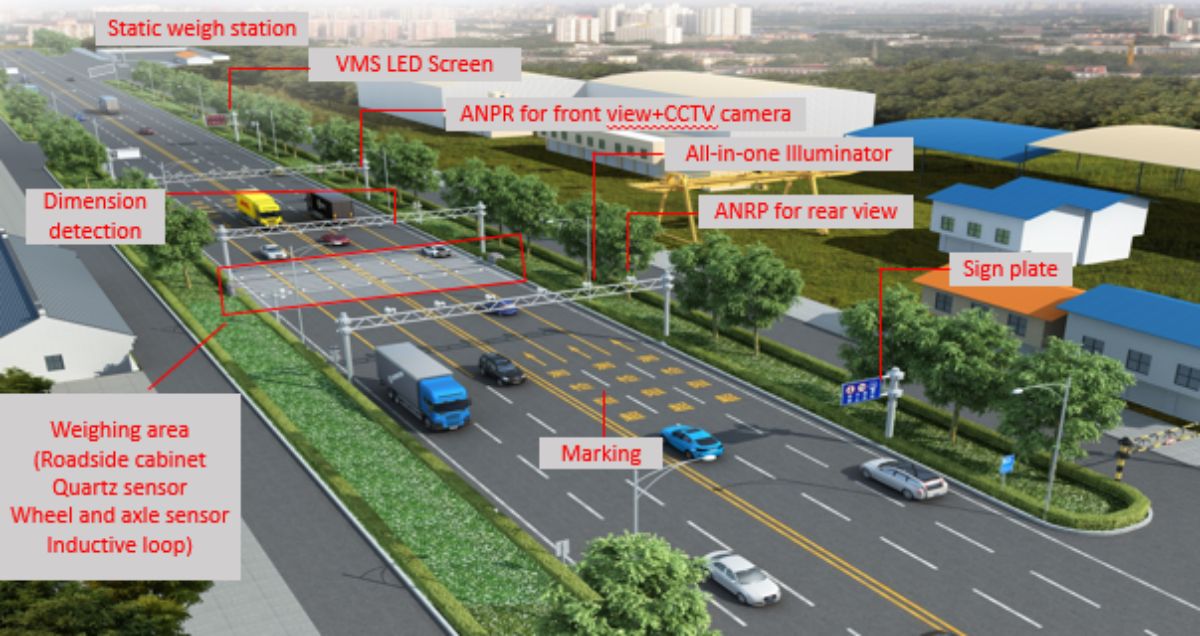
2. System gromadzenia informacji i analizy kryminalistycznej przeciążenia czołowych pojazdów ciężarowych składa się zazwyczaj ze sprzętu do ciągłego ważenia, sprzętu do wykrywania rozmiarów profili pojazdów, sprzętu do rozpoznawania i przechwytywania tablic rejestracyjnych, detektora pojazdów, sprzętu do monitoringu wideo, sprzętu do udostępniania informacji, znaków drogowych, urządzeń zasilających i przeciwprzepięciowych, szaf sterowniczych na miejscu, sprzętu do gromadzenia i przetwarzania informacji oraz transmisji sieciowej, obszaru ciągłego ważenia i wykrywania, oznakowania znaków drogowych i powiązanych urządzeń pomocniczych.
3. Platforma do zarządzania informacjami o przeciążeniu pojazdów ciężarowych (w tym do bezpośredniego egzekwowania przepisów) składa się zazwyczaj z platform do zarządzania informacjami o przeciążeniu pojazdów na szczeblu powiatowym (dzielnicowym), miejskim i wojewódzkim (w tym do bezpośredniego egzekwowania przepisów).
2. Wymagania funkcjonalne
1. Wymagania funkcjonalne dla urządzeń do ważenia ciągłego
1.1 Zakres prędkości roboczej
Zakres prędkości urządzeń do ciągłego ważenia wynosi (0,5~100) km/h, w przypadku gdy pojazdy ciężarowe przejeżdżają przez obszar ciągłego wykrywania.
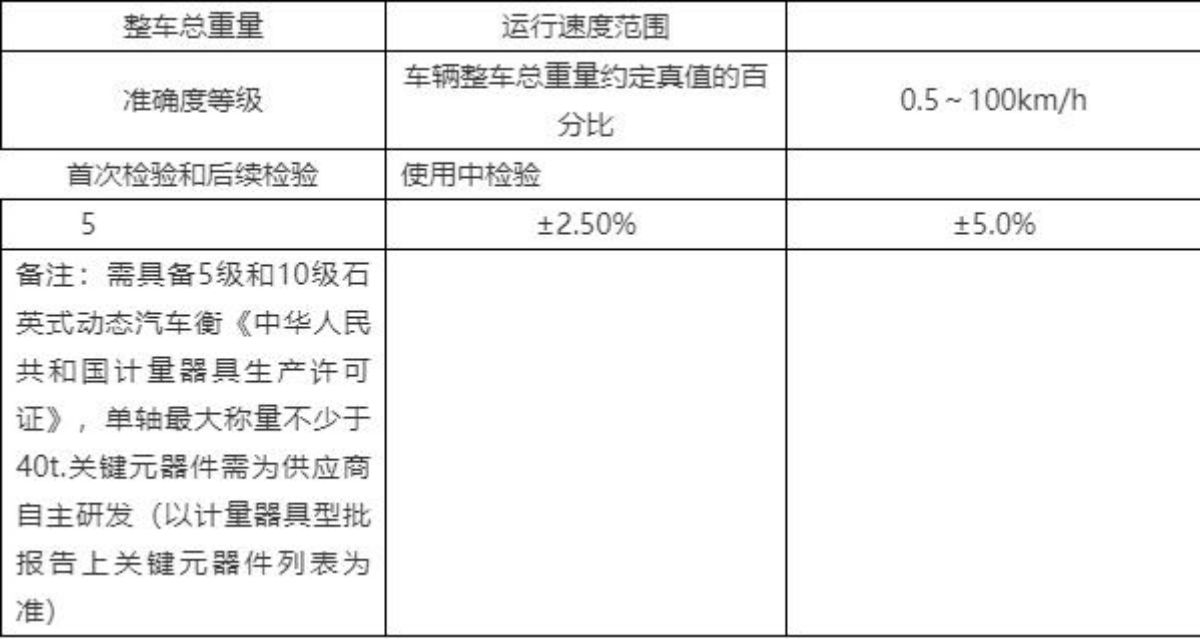
1.2 Poziom dokładności całkowitej masy pojazdu
(1) Maksymalny dopuszczalny błąd ważenia całkowitej masy pojazdu i ładunku w dopuszczalnym zakresie prędkości roboczych urządzenia do ciągłego ważenia nie może być mniejszy niż wymagania określone w przepisach JJG 907 „Przepisy dotyczące weryfikacji automatycznego urządzenia do dynamicznego ważenia pojazdów na autostradach” (Tabela 2-1).
Tabela 2-1 Maksymalny dopuszczalny błąd dynamicznego ważenia całkowitej masy pojazdu
(2) Gdy pojazd towarowy przejeżdża przez obszar wykrywania ciągłego ważenia z nietypowymi zachowaniami kierowcy, takimi jak częste przyspieszanie i zwalnianie, podskakiwanie wagi, zatrzymywanie się, zakręt w kształcie litery S, skrzyżowanie, linia ciśnieniowa, jazda wstecz lub zatrzymywanie się i ruszanie w krótkim czasie, poziom dokładności całkowitej masy pojazdu sprzętu do ciągłego ważenia nie może być niższy niż postanowienia i wymagania określone w Tabeli 2-1. (Ważne jest wciskanie pasów i jazda w przeciwnym kierunku).
1.3 Ogniwo tensometryczne używane w urządzeniach do ciągłego ważenia musi być zgodne z przepisami i wymogami normy GB/T7551 „Ogniwo tensometryczne”, jego żywotność musi wynosić ≥ 50 milionów osi, a poziom ochrony ogniwa tensometrycznego używanego w urządzeniach do ciągłego ważenia nie może być niższy niż IP68.
1.4 Średni czas bezawaryjnej pracy urządzeń do ważenia ciągłego nie może być krótszy niż 4000 godzin, okres gwarancji na kluczowe podzespoły nie może być krótszy niż 2 lata, a okres eksploatacji nie może być krótszy niż 5 lat.
1.5 Wymagania dotyczące zabezpieczenia przed wyłączeniem zasilania
(1) Po wyłączeniu zasilania urządzenie do ciągłego ważenia powinno mieć możliwość automatycznego zapisywania aktualnie ustawionych parametrów i informacji o ważeniu, a czas przechowywania nie powinien być krótszy niż 72 godziny.
(2) W przypadku zaniku zasilania czas pracy wewnętrznego zegara urządzenia do ważenia ciągłego nie powinien być krótszy niż 72 dni.
1.6 Wymagania dotyczące obróbki antykorozyjnej
Odsłonięte części metalowe urządzeń do ciągłego ważenia powinny zostać zabezpieczone przed korozją zgodnie z odpowiednimi postanowieniami normy GB/T18226 „Warunki techniczne dotyczące antykorozji elementów stalowych w inżynierii ruchu drogowego”.
1.7 Błąd pomiaru prędkości detektora pojazdów w urządzeniu do ciągłego ważenia powinien wynosić ≤± 1 km/h, a dokładność wykrywania przepływu ruchu powinna wynosić ≥99%.
1.8 Wymagania techniczne dotyczące separatorów pojazdów przeznaczonych do urządzeń do ważenia ciągłego są następujące:
(1) Dokładność wykrywania liczby osi powinna wynosić ≥98%.
(2) Błąd wykrywania rozstawu wałów powinien wynosić ≤± 10 cm.
(3) Dokładność klasyfikacji pojazdów powinna wynosić ≥ 95%.
(4) Współczynnik rozpoznawania międzykanałowego powinien wynosić ≥98%.
1.9 Zakres dopuszczalnych temperatur otoczenia powinien mieścić się w granicach od -20°C do +80°C, a wskaźniki techniczne odporności na wilgoć otoczenia powinny spełniać odpowiednie przepisy i wymagania dotyczące zewnętrznego sprzętu mechanicznego i elektrycznego określone w normie JT/T817 „Ogólne wymagania techniczne i metody badań dla sprzętu elektromechanicznego systemów drogowych”.
1.10 Należy zastosować środki chroniące przed deszczem i kurzem, a poziom ochrony powinien spełniać wymagania i postanowienia JT/T817.

2. Wymagania funkcjonalne dla urządzeń do badania wielkości profilu pojazdu
2.1 Gdy pojazd towarowy przejeżdża przez obszar detekcji nieprzerwanego ważenia z prędkością (0,5~100) km/h, powinien być w stanie automatycznie zakończyć szybkie wykrywanie w czasie rzeczywistym wymiarów geometrycznych i modelu 3D długości, szerokości i wysokości pojazdu towarowego oraz wyprowadzić prawidłowe wyniki identyfikacji. Czas reakcji nie powinien być krótszy niż 30 ms, a czas ukończenia pojedynczego wykrywania i wyprowadzenia wyniku nie powinien być dłuższy niż 5 s.
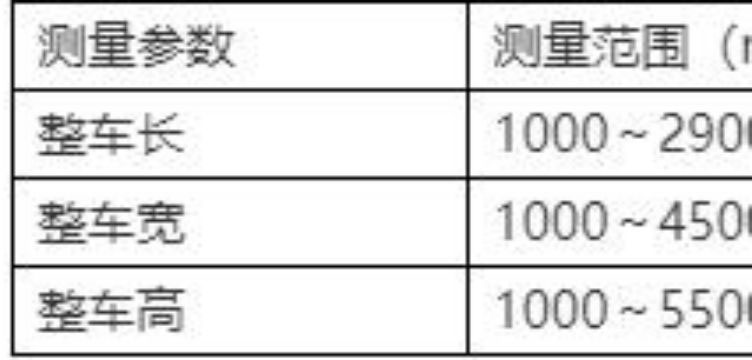
2.2 Zakres pomiarów geometrycznych długości, szerokości i wysokości pojazdu ciężarowego powinien spełniać wymagania podane w tabeli 2-2.
Tabela 2-2 Zakres pomiarowy urządzeń do badania wielkości profilu pojazdu
2.3 Rozdzielczość pomiaru wymiarów geometrycznych długości, szerokości i wysokości pojazdu towarowego nie jest większa niż 1 mm, a błąd pomiaru urządzenia wykrywającego wielkość obrysu pojazdu powinien spełniać następujące wymagania w zakresie 1~100 km/normalna prędkość robocza: (pod względem prędkości jazdy powinna być zgodna z wymaganiami poprzedniego urządzenia do dynamicznego ważenia).
(1) Błąd długości ≤±500 mm;
(2) Błąd szerokości ≤±100 mm;
(3) Błąd wysokości ≤± 50 mm.
2.4 Częstotliwość wykrywania plamki laserowej sprzętu do badania wielkości profilu pojazdu powinna wynosić ≥1 kHz, a urządzenie powinno obsługiwać 9 typów modeli pojazdów i funkcji wykrywania prędkości pojazdu określonych w normie GB1589 dotyczącej pojazdów mechanicznych „Wielkość obrysu, obciążenie osi i ograniczenia jakościowe samochodów, przyczep i zestawów samochodowych”.
2.5 Powinien on posiadać funkcje równoległego transportu pojazdów, oceny stanu jazdy w kształcie litery S, ekranowania czarnego materiału oraz wykrywania geometrycznego rozmiaru profilu pojazdu przewożącego materiały o wysokim współczynniku odbicia.
2.6 powinien zawierać klasyfikację modeli pojazdów ciężarowych, natężenie ruchu, prędkość lokalizacji, odległość czasową z przodu, procentową odległość samochodu, odstęp między przednimi siedzeniami, funkcje wykrywania zajętości w czasie. A dokładność klasyfikacji modeli pojazdów ciężarowych powinna wynosić ≥ 95%.
2.7 Zakres dopuszczalnych temperatur otoczenia powinien mieścić się w granicach od -20 °C do +55 °C, a wskaźniki techniczne odporności na wilgoć otoczenia powinny spełniać odpowiednie przepisy i wymagania dotyczące zewnętrznego sprzętu mechanicznego i elektrycznego określone w normie JT/T817 „Ogólne wymagania techniczne i metody badań dla sprzętu elektromechanicznego systemów drogowych”.
2.8 Urządzenie do laserowego pomiaru wielkości profilu pojazdu powinno być zamontowane z bramką z kanałem konserwacyjnym
2.9 Poziom ochrony urządzenia do badania rozmiaru profilu pojazdu nie może być niższy niż IP67.
3. Wymagania funkcjonalne dla urządzeń do rozpoznawania i rejestrowania tablic rejestracyjnych
3.1 Wymagania funkcjonalne dotyczące urządzeń do rozpoznawania i rejestrowania tablic rejestracyjnych muszą spełniać odpowiednie postanowienia i wymagania określone w normie GB/T 28649 „Automatyczny system identyfikacji tablic rejestracyjnych pojazdów mechanicznych”.
3.2 Sprzęt do rozpoznawania i rejestrowania tablic rejestracyjnych musi być wyposażony w światło doświetlające lub światło migające, które musi wyraźnie rejestrować numer pojazdu przejeżdżającego przez strefę ciągłego ważenia w każdych warunkach pogodowych i podawać prawidłowy wynik identyfikacji.
3.3 Sprzęt do rozpoznawania i przechwytywania tablic rejestracyjnych powinien zapewniać dokładność rozpoznawania tablic rejestracyjnych ≥ 99% w ciągu dnia i dokładność rozpoznawania tablic rejestracyjnych ≥ 95% w nocy, a czas rozpoznawania nie powinien być dłuższy niż 300 ms.
3.4 Obraz tablicy rejestracyjnej pojazdu towarowego powinien zostać wyraźnie wyświetlony w formacie JPG na całej szerokości ekranu, a wynik rozpoznania powinien zawierać czas rozpoznania, kolor tablicy rejestracyjnej itp.
3,5 pikseli obrazu przechwytywanego przez system rozpoznawania tablic rejestracyjnych nie powinna być mniejsza niż 5 milionów, a rozdzielczość pozostałych pikseli obrazu przechwytywanego przez system nie powinna być mniejsza niż 3 miliony. Pojazdy ciężarowe przejeżdżające przez obszar ciągłego wykrywania ważenia powinny przechwytywać przód pojazdu, dwie strony pojazdu i tył pojazdu, łącznie nie mniej niż 4 obrazy o wysokiej rozdzielczości.
3.6 Zgodnie z informacjami o obrazie wysokiej rozdzielczości z przodu, obszar tablicy rejestracyjnej pojazdu towarowego, cechy przodu i kabiny, kolor przodu itp. powinny wyraźnie odróżniać liczbę osi, kolor nadwozia i podstawową lokalizację przewożonych towarów zgodnie z informacjami o obrazie wysokiej rozdzielczości z boku pojazdu; zgodnie z informacjami o obrazie wysokiej rozdzielczości z tyłu pojazdu, można odróżnić numer tablicy rejestracyjnej z tyłu, kolor nadwozia i inne informacje.
3.7 Na każdy obraz należy nałożyć informacje takie jak data wykrycia, godzina badania, miejsce badania, całkowita masa pojazdu i ładunku, wymiary pojazdu, numer sprzętu do analizy obrazu, informacje o zabezpieczeniu przed fałszerstwami i inne.
3.8 Szerokość pasma kanału transmisji informacji o przechwyconym obrazie nie może być mniejsza niż 10 Mb/s.
3.9 Powinien posiadać funkcje autodiagnostyki błędów, takie jak wykrywanie nieprawidłowej komunikacji lub awarii zasilania.
3.10 Zakres dopuszczalnych temperatur otoczenia powinien mieścić się w granicach od -20 °C do +55 °C, a wskaźniki techniczne odporności na wilgoć otoczenia powinny spełniać odpowiednie przepisy i wymagania dotyczące zewnętrznego sprzętu mechanicznego i elektrycznego określone w normie JT/T817 „Ogólne wymagania techniczne i metody badań dla sprzętu elektromechanicznego systemów drogowych”.
3.11 Poziom ochrony urządzeń do rozpoznawania i rejestrowania tablic rejestracyjnych nie może być niższy niż IP67.
4 Wymagania funkcjonalne sprzętu do monitoringu wizyjnego
4.1 Kamera do monitoringu wizyjnego powinna być wyposażona w funkcję kamery na podczerwień pracującą w dzień i w nocy, a także powinna umożliwiać nieprzerwane wykrywanie ważenia pojazdów dookoła oraz zapisywanie nie mniej niż 10-sekundowych danych wideo z gromadzenia dowodów nielegalnego przeciążenia pojazdów ciężarowych.
4.2 Powinien posiadać funkcje autodiagnostyki, kalibracji pola widzenia i automatycznej kompensacji.
4.3 Obrazy wideo przeznaczone do analizy kryminalistycznej nie powinny mieć mniejszej rozdzielczości niż 3 miliony pikseli, muszą być wyraźne i stabilne.
4.4 Powinien mieć funkcję obrotu i zoomu, a obrót w poziomie i pionie oraz zoom obiektywu mogą być wykonywane zgodnie z poleceniem sterującym.
4.5 Powinien mieć funkcję czyszczenia i demontażu lamp przeciwmgielnych chroniących przed deszczem i szronem, a także powinien umożliwiać czyszczenie, podgrzewanie i rozmrażanie osłony ochronnej w odpowiednim czasie.
4.6 Obrazy wideo pochodzące z analizy kryminalistycznej powinny być przesyłane w czasie rzeczywistym do platformy zarządzania informacjami o przeciążeniu i bezpośredniego egzekwowania prawa na poziomie powiatu (miasta).
4.7 Sprzęt do monitoringu wizyjnego i inne wskaźniki techniczne jego wyposażenia muszą spełniać odpowiednie postanowienia i wymagania określone w normie GA/T995.
4.8 Zakres dopuszczalnych temperatur otoczenia powinien mieścić się w granicach od -20°C do +55°C, a wskaźniki techniczne odporności na wilgoć otoczenia powinny spełniać odpowiednie przepisy i wymagania dotyczące zewnętrznego sprzętu mechanicznego i elektrycznego określone w normie JT/T817 „Ogólne wymagania techniczne i metody badań dla sprzętu elektromechanicznego systemów drogowych”.
5 Wymagania funkcjonalne dla urządzeń do publikacji informacji
5.1 Powinien on mieć możliwość udostępniania kierowcy przeciążonego pojazdu informacji w czasie rzeczywistym o stopniu przeciążenia.
5.2 Powinna mieć możliwość publikowania i wyświetlania informacji, takich jak zmiana tekstu i przewijanie.
5.3 Główne wskaźniki funkcjonalne i wskaźniki techniczne znaków informacyjnych LED na autostradach muszą spełniać odpowiednie postanowienia i wymagania określone w normie GB/T23828 „Znaki informacyjne LED na autostradach”.
5.4 Dwukolumnowy typ bramy drogowej LED ekran informacyjny o zmiennej informacji powszechnie używany odstęp pikseli może być wybrany: 10 mm, 16 mm i 25 mm. Rozmiar obszaru wyświetlania czterech i sześciu pasów może wynosić odpowiednio 10 metrów kwadratowych i 14 metrów kwadratowych. Format zawartości wyświetlania może wynosić 1 wiersz i 14 kolumn.
5.5 Odstęp pikseli wyświetlacza LED zmiennej informacji jednokolumnowej autostrady można wybrać: 10 mm, 16 mm i 25 mm. Rozmiar ekranu wyświetlacza można wybrać spośród 6 metrów kwadratowych i 11 metrów kwadratowych. Format wyświetlanej zawartości może wynosić 4 wiersze i 9 kolumn.
5.6 Projekt i rozmieszczenie znaków informacyjnych LED na autostradach oraz odległość umożliwiająca rozpoznawanie wizualne powinny w pełni uwzględniać rzeczywistą prędkość i potrzeby rozpoznawania wizualnego pojazdów ciężarowych na danym odcinku drogi, a także spełniać odpowiednie postanowienia i wymagania określone w normie GB/T23828 „Znaki informacyjne LED na autostradach”.
6 Wymagania dotyczące ustawiania znaków drogowych
6.1 Ustawić znak drogowy informujący o wjeździe na „obszar ciągłego ważenia i wykrywania” w odległości nie mniejszej niż 200 metrów przed obszarem ciągłego ważenia i wykrywania.
6.2 Ustawić znak drogowy „zakaz zmiany pasa ruchu” nie bliżej niż 150 metrów przed strefą ciągłego wykrywania ważenia.
6.3 Ustawić znak drogowy „Znieść zakaz zmiany pasa ruchu” w odległości nie mniejszej niż 200 metrów za strefą ciągłego pomiaru ważenia.
6.4 Ustawianie znaków drogowych w obszarze ciągłego wykrywania ważenia powinno być zgodne z projektem i wymaganiami określonymi w normie GB5768 „Znaki i oznakowania drogowe”.
7. Wymagania dotyczące uziemienia urządzeń zasilających i odgromowych
7.1 System gromadzenia informacji o przeciążeniach i analizy kryminalistycznej powinien być wyposażony w stabilne i niezawodne linie zasilania, które muszą spełniać wymagania nieprzerwanej pracy zasilania przez 24 godziny na dobę.
7.2 Należy podjąć niezbędne środki ochrony przeciwprzepięciowej i przeciwpiorunowej dla interfejsu zasilania i interfejsu sterowania systemu gromadzenia informacji o przeciążeniu i analizy kryminalistycznej oraz powiązanych komponentów, a środki ochronne muszą być zgodne z odpowiednimi postanowieniami i wymogami normy JT/T817 „Ogólne wymagania techniczne i metody badań dla urządzeń elektromechanicznych systemów drogowych”.
7.3 System gromadzenia informacji o przeciążeniu i analizy kryminalistycznej powinien wykorzystywać metodę uziemienia pojedynczego punktu w pobliżu oraz metodę równoległego uziemienia prądu stałego.
7.4 Ochrona odgromowa i rezystancja elektryczna sprzętu do gromadzenia informacji o przeciążeniu i sprzętu do analizy kryminalistycznej musi wynosić ≤ 10 Ω, a rezystancja uziemienia ochronnego musi wynosić ≤ 4 Ω.
8 Wymagania funkcjonalne szafy sterowniczej polowej

8.1 Szafa sterownicza na miejscu skonfigurowana z systemem gromadzenia informacji o przeciążeniu i systemem forensyki powinna być w stanie przechowywać procesory akwizycji danych, detektory pojazdów, przełączniki sieciowe i inny sprzęt. Powinna być w stanie przesłać informacje o przeciążeniu ciężarówki do Provincial Department of Transportation Information Center Traffic Comprehensive Administrative Direct Enforcement Platform i być w stanie przesłać informacje o przeciążeniu ciężarówki do drogowego znaku informacyjnego LED w czasie rzeczywistym w celu udostępnienia i wyświetlenia.
8.2 Szafa sterownicza powinna być wyposażona w dwuwarstwową uszczelkę obudowy, która skutecznie zapobiega przedostawaniu się kurzu i deszczu, a także w niezależny system kontroli temperatury.
8.3 Szafa sterownicza powinna być zaprojektowana z uwzględnieniem szczelin umożliwiających rozbudowę funkcji.
8.4 Szafa sterownicza powinna być wyposażona w urządzenia ochrony danych zapobiegające wyciekowi danych wykrywających przekroczenia limitów.
9. Wymagania dotyczące tworzenia stanowisk do ciągłego ważenia pojazdów przeciążonych autostradą
9.1 Obszar wykrywania ciągłego ważenia składa się z nośnika urządzenia do ciągłego ważenia (czujnik kwarcowy) oraz jego sekcji prowadzących z przodu i z tyłu (odpowiednio do utwardzonej nawierzchni drogi o szerokości 30 metrów z przodu i 15 metrów z tyłu) (rysunek 2-1).

Rysunek 2-1 Schematyczny diagram obszaru ciągłego ważenia
9.2 Lokalizacja obszaru ciągłego ważenia i testowania nie powinna być zlokalizowana na płaskim terenie, promień łuku podłużnego jest mały, widoczność jest słaba, a długie odcinki zjazdowe i inne odcinki drogi, a wskaźniki liniowe powinny spełniać normę ASTM E1318 „Standardowa specyfikacja dla systemów ważenia w ruchu (WIM) na autostradach z wymaganiami użytkownika i testem”. Metody, szczegółowe wymagania są następujące:
(1) Promień skrętu osi drogi na odcinku prowadzącym o długości 60 m oraz na tylnym odcinku prowadzącym o długości 30 m w obszarze wykrywania nieprzerwanego ważenia powinien wynosić ≥ 1,7 km.
(2) Podłużne nachylenie nawierzchni drogi na przednim 60-metrowym odcinku prowadzącym i tylnym 30-metrowym odcinku prowadzącym w obszarze wykrywania ciągłego ważenia powinno wynosić ≤2%.
(3) Wartość nachylenia poprzecznego nawierzchni i przedniej 60-metrowej części drogi prowadzącej i tylnej 30-metrowej części drogi prowadzącej obszaru wykrywania ciągłego ważenia powinna wynosić 1% ≤ i ≤2%.
(4) Na odcinku drogi prowadzącej o długości 150 m przed strefą wykrywania ciągłego ważenia nie powinny znajdować się żadne przeszkody blokujące widoczność kierowcy.
(5) Odległość między miejscem stałego ważenia i wykrywania a wjazdem i wyjazdem z tunelu autostradowego na tym samym odcinku drogi nie może być mniejsza niż 2 km i nie może być mniejsza niż 1 km.
(6) Błąd poziomy połączenia czujnika z nawierzchnią drogi nie jest większy niż 0,1 mm
9.3 Aby zapewnić dokładność danych z ciągłego ważenia i bezpieczeństwo jazdy, pas ruchu przedniej 60-metrowej drogi pomocniczej i tylnej 30-metrowej drogi pomocniczej obszaru wykrywania ciągłego ważenia powinien być wydzielony linią ciągłą.
9.4 Ciągły obszar ważenia i testowania w celu kierowania budową odcinków dróg
(1) Podłoże drogi na odcinku drogi wzorcowej powinno być stabilne, a współczynnik tarcia nawierzchni powinien spełniać wymagania projektowe danego odcinka drogi.
(2) Powierzchnia nawierzchni odcinka drogi prowadzącej powinna być gładka i zwarta, a nawierzchnia asfaltowa nie powinna mieć kolein, dziur, zapadnięć, zatorów, pęknięć, pęknięć sieciowych i wybrzuszeń, a nawierzchnia cementowa nie powinna mieć przesunięć, pękniętych płyt, zapadnięć, nagromadzenia błota i innych chorób. Płaskość nawierzchni cementowo-betonowej i nawierzchni asfaltowo-betonowej musi spełniać odpowiednie przepisy i wymagania JTGF80-1 „Normy kontroli i oceny jakości inżynierii drogowej”.
(3) Szerokość nawierzchni drogi na odcinku drogi orientacyjnej powinna umożliwiać normalny przejazd najszerszego pojazdu ciężarowego mieszczącego się w zakresie ważenia.
(4) Linia środkowa nawierzchni w obszarze nieprzerwanego ważenia i testowania powinna być oddzielona podwójną żółtą (pojedynczą żółtą) linią ciągłą, a linia rozgraniczająca pasy ruchu powinna być oddzielona białą linią ciągłą.
3. Wymagania dotyczące protokołu interfejsu i formatu danych
Protokół interfejsu i format danych systemu ciągłego wykrywania przeciążenia autostrad powinny spełniać odpowiednie postanowienia i wymagania „Fujian Traffic Comprehensive Administrative Direct Enforcement Engineering Design Plan” w celu zapewnienia połączenia i wymiany informacji między platformami zarządzania informacjami o przeciążeniu na szczeblu powiatowym (dzielnicy), miejskim i prowincjonalnym (w tym bezpośredniego egzekwowania).

Enviko Technology Co.,Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Biuro w Chengdu: nr 2004, jednostka 1, budynek 2, nr 158, ulica Tianfu 4th, strefa high-tech, Chengdu
Biuro w Hongkongu: 8. piętro, budynek Cheung Wang, ulica San Wui 251, Hongkong
Fabryka: Budynek 36, Strefa Przemysłowa Jinjialin, Miasto Mianyang, Prowincja Syczuan
Czas publikacji: 25-01-2024




